
Iremos falar sobre o projeto ATLAS e da sua historia, quando apareceu o ATLASCAR e também das tecnologias associadas ao ATLASCAR.
After several months with a lot of work and difficulties, ATLASCAR was finally presented at Festival Nacional Robótica in Lisbon for the first time.
AtlasCar is a project intended to develop solutions to increase safety in our vehicles. In order that our solutions have more impact, it was required that ATLAS group update the existent platform in order that we could influence the vehicle behavior. Afterward is possible to study how the rules, algorithms can assist the driver in order to avoid accidents, like run down pedestrians or animals, sudden appearance of bicycles, and other situations.
the enclosed videos shows our presentation that finalized with ATLASCAR tracking a pedestrian and following it.
If you want to follow us, look for as in the  ,
,  and at Atlas Project website.
and at Atlas Project website.

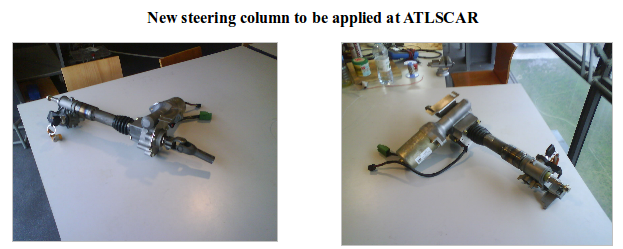
Last December of 2010 a new advance was made at ATLASCAR steering. This new advance, consisted in a mechanical update of the steering column.
The mechanical updated consisted in merging the old column into the new one.
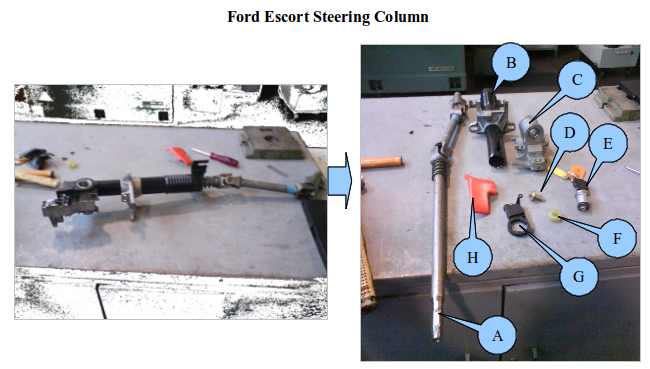
The column is composed by 8 main components that need to be assembled into the new column.
A- shaft that transmits movement from the steering wheel to the pinion;
B- bracket to support the column into the cars chassis
C- end tip thats guarantees that the steer shaft is concentric and without any abnormal movement
D,F – bolt and spacer to connect steering wheel with shaft.
E- ignition key assembled at C
G- ignition thief lock
H- hood opening lever
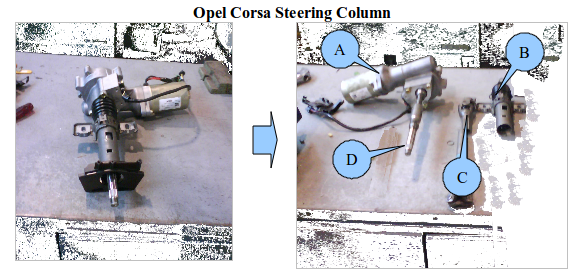
A- electric steer column
B- column support bracket
C- universal joint shaft
D- steering wheel shaft
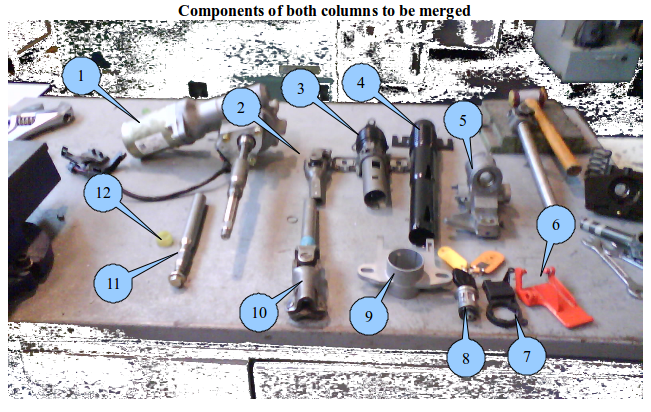
1- opel corsa eletric steer column
2- opel corsa shaft with universal joint (column side)
3- opel corsa support bracket
4- ford escort support bracket1
5- ford escort end tip
6- ford escort hood opening lever
7- ford escort ignition thief lock
8- ford escort ignition
9- ford escort support bracket 2 to be updated
10- ford escort shaft with universal joint (pinion side)
11- ford escort shaft steering wheel
12- spacer to steering wheel
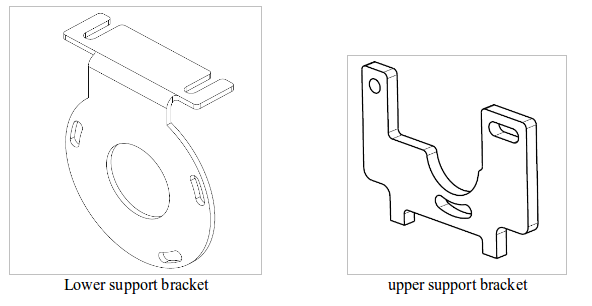
As can be observed the new column is a mix of the previous two. The column is made with the development and adjustment of some parts.
The new developed parts were:
upper support bracket
lower support bracket
potentiometer support bracket
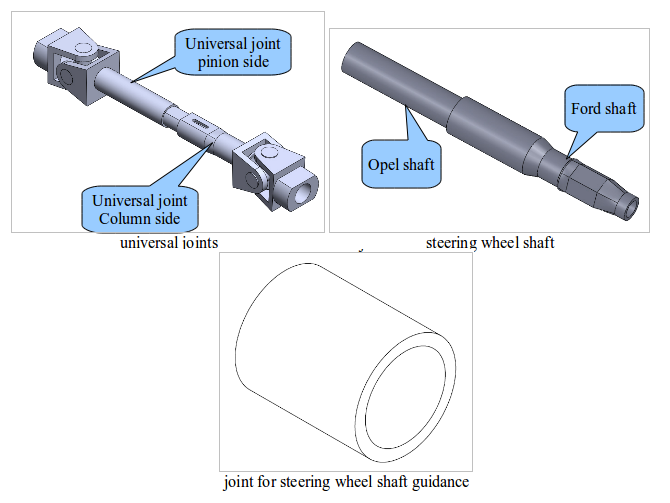
The updated parts were:
re-design of opel corsa universal joint steering column side
re-design of ford universal joint pinion side
re-design of steering wheel shaft
re-design of guidance for steering shaft
Pretende-se uma solução que automatize a ignição do ATLASCAR, sem que comprometa a ignição através da chave. A ideia seria utilizar o conceito da ligação directa.
No canhão existem 2 pares de cabos:
-Power (representados a vermelho)
-Starter (representados a castanho)
Como o ATLASCAR tem uma protecção que só permite ligar o carro se a chave estiver na ignição, a ideia é manter sempre a chave na ignição na posição 2 (posição de energia ligada) e fazer o controlo da energia com um relé em série com os cabos da energia. A ignição é feita com um relé em paralelo com o canhão sendo assim possível a ignição por chave ou automática. Os relés serão ligados ao PLC que fará o controlo da ignição.
 Sites Úteis:
Sites Úteis:


